Sommaire
- LE MATERIEL
- La carte MD25 - Dual 12Volt 2.8Amp H Bridge Motor Drive
- Les cartes Netduino
- Les cartes FEZ
- LE LOGICIEL
- LIENS
1. LE MATERIEL
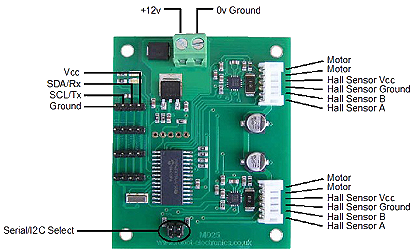
1.1 La carte MD25 - Dual 12Volt 2.8Amp H Bridge Motor Drive
- Présentation
- Alimentation : 12 Vcc (un régulateur 5 Vcc intégré délivre 300 mA pour l’électronique de commande externe).
- Possibilités: Plusieurs platines peuvent être pilotées en même temps via un bus I2C™
- Dimensions: 70 x 60 x 25 mm.
- Documentation : MD25 - Dual 12Volt 2.8Amp H Bridge Motor Drive
- Distributeur : GOTRONIC
Destinée à être commandée par un microcontrôleur au moyen d'une liaison série (niveau logique 0 - 5 V) ou via un
bus I2C™, cette platine électronique intègre un
double pont en "H" permettant le pilotage indépendant de
2 moteurs à courant continu avec encodeur (consommation: 2,5 A max. par moteur).
Des ordres simples permettent de définir le sens de rotation ainsi que la vitesse des moteurs, de lire les informations
en provenance des encodeurs, de lire les valeurs de la tension et du courant consommé par les moteurs, de connaître
leur vitesse de rotation, de définir les accélérations, etc...
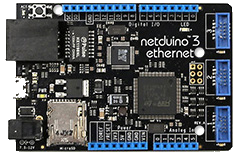
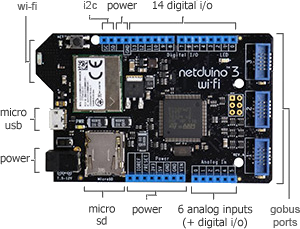
1.2 Les cartes Netduino
Secret Labs
- Microcontrôleur : STM32F405RG 32 bits à architecture Cortex-M4 cadencé à 168 MHz.
- RAM : 164KB+.
- Flash : 1408KB.
- Port Ethernet : 10/100Mbps (Wifi:802.11b/g/n)*.
- E/S numériques : 22
- Entrées analogiques : 6
- Stockage: carte µSD
- IDE : Microsoft Visual Studio
- Framework : .NETMF 4.3
- Langages de programmation : C#, VB
- Compatibilité : shield Arduino, Gadgeteer
|
|
| Netduino 3 Ethernet | Netduino 3 wifi* |
- Sites à consulter : Netduino
- Distributeurs : Mouser Electronics
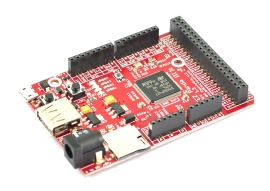
1.3 Les cartes FEZ
GHI Electonics (Extrait)
- Microcontrôleur : 180 MHz 32-bit ARM Cortex-M4.(120 MHz 32-bit ARM Cortex-M3 )*
- SoC(SoM)* : G80 G120*
- RAM : 156 KB(2.87 MB)*.
- Flash : 256 KB (13.67 MB)*.
- E/S numériques : 53(60)*
- Entrées analogiques : 16(8)*
- Réseaux : Ethernet TCP/IP, WiFi, and SSL.
- Stockage: carte µSD
- IDE : Microsoft Visual Studio
- Framework : .NETMF 4.3
- Langages de programmation : C#, VB
|
|
| PANDA III | COBRA III* (compatible Gadgeteer) |
- Sites à consulter : GHI ELECTRONICS
- Distributeurs : Mouser Electronics
- Schémas : Panda III, Cobra III
2. LE LOGICIEL
2.1 Contenu du répertoire proposé au téléchargement
Le répertoire proposé au téléchargement (au format zip ou tar.gz) contient la solution MD25 composée:
- Du projet MD25 : le code source de la classe MotorControlMD2x.
- Du projet Netduino : un exemple d'utilisation de cette classe avec une carte Netduino2 plus.
- Du projet FezPanda : un exemple d'utilisation de cette classe avec une carte Panda III.
2.2 Le NuGet MicroToolsKit
La dernière version compilée de la classe MotorControlMD2x se situe dans la bibliothèque MicroToolsKit disponible sur nuget.org.

Organisation des classes contenues dans MicroToolsKit [lien]
Important : Installer ce nuget dans le projet Visual Studio simplifie l'utilisation de la classe.
2.3 Le wiki .NetMF v4.4
-
Un wiki est dédié au
microframework .Net v4.4. Il propose au téléchargement :
- Des exemples de code pour les cartes Netduino, GHI FEZ (Panda 3 , BrainPad etc.) . [lien]
2.4 Description et utilisation de la classe MD2x
- Rôle: Contrôler deux motoréducteurs équipés d'un encodeur via le bus I²C.
- Assembly: MicroToolsKit (disponible sur nuget.org)
- Espace de noms: Microtoolskit.Hardware.MotorDrivers
Création d'un projet avec l'IDE Visual Studio
- Créer un nouveau projet en suivant la démarche décrite dans le chapitre "Premier programme en C# étape par étape" avec une carte Netduino ou avec une carte Fez (Panda 3, BrainPad etc). [lien]
- Utiliser le gestionnaire de paquets NuGet pour ajouter la bibliothèque MicroToolsKit ( nuget.org) dans le projet. (Dans l'explorateur de solution, clic droit sur les Références du projet puis choisir Gérer les packages NuGet.... Installer le paquet.)
- Ajouter l'espace de noms Microtoolskit.Hardware.MotorDrivers dans l'en-tête du fichier source.
- Créer un objet en utilisant un des constructeurs MotorControlMD2x.
- Régler la fréquence de rotation des moteurs avec la méthode SetSpeedTurn.
- etc...
Exemple
using System;
using System.Threading;
using Microsoft.SPOT;
using Microtoolskit.Hardware.MotorDrivers;
namespace NetduinoMD25
{
public class Program
{
public static void Main()
{
var MD25 = new MotorControlMD2x();
// Pour info : Lecture des registres de la carte MD2x et affichage de la version du logiciel
Debug.Print("Vers.=" + MD25.SoftRev.ToString());
Debug.Print("Tension=" + ((Single)MD25.Battery / 10).ToString("N1") + "V");
Debug.Print("Acceleration=" + MD25.AccelerationRate.ToString());
Debug.Print("Mode=" + MD25.Mode.ToString());
while (true)
{
// Essai : Rotation des moteurs jusqu'à ce que la distance recherchée soit atteinte
// ---------------------------------------------------------------------
MD25.RazEncoders(); // Remise à zéro des codeurs
MD25.SetSpeedTurn(140, 140); // Réglage de la vitesse des moteurs
while (MD25.Encoder1 < 2000)
{
Debug.Print("Codeur 1=" + MD25.Encoder1.ToString() + " " + "Codeur 2=" + MD25.Encoder2.ToString() +
" Speed1=" + MD25.Speed1.ToString() + " Speed2=" + MD25.Speed2Turn.ToString());
}
MD25.StopMotor(); // Arrêt des moteurs
Thread.Sleep(5000);
}
}
}
}
Constructeurs
| Syntaxe | Description | |

|
MotorControlMD2x() | Instancie un objet "MD25".
SLA = 0x58 (par défaut). Frequency : fréquence du bus I²C = 100kHz (par défaut) Exemple var MD25 = new MotorControlMD2x(); |
|
|
MotorControlMD2x( UInt16 SLA) | Instancie un objet "MD25".
SLA: à définir dans l'intervalle [0x58,0x5F]. Frequency: fréquence du bus I²C = 100kHz Exemple var MD25 = new MotorControlMD2x(0x59); |
|
|
MotorControlMD2x( UInt16 SLA, UInt16 Frequency) | Instancie un objet "MD25".
SLA: à définir dans l'intervalle [0x58,0x5F]. Frequency: fréquence du bus I²C à définir dans l'intervalle [100kHz,400kHz]. Exemple var MD25 = new MotorControlMD2x(0x58,200); |
Enumérations
| Syntaxe | Description | |

|
ModeRegister |
Mode 0, Mode 1
Commande indépendante des deux moteurs. - Speed 1 règle la vitesse du moteur 1. - Speed 2 règle la vitesse du moteur 2. Mode 2, Mode 3 - Le registre Speed1 définit la vitesse médiane des deux moteurs. - Le registre Speed2Turn définit le diférentiel de vitesse à appliquer en + ou en - à chaque moteur (voir la propriété Speed2). Effet des paramètres de la méthode SetSpeedTurn : ValSpeed1 et ValSpeed2 ou des propriétés Speed1 et Speed2Turn dans les différents modes.
|
Propriétés
| Syntaxe | Description | |

|
Speed1 |
Fixe (à venir) ou retourne la consigne de vitesse du moteur 1 (mode 0, 1) ou des deux moteurs (mode 2,3).
Type : byte Note
Exemples // Pour connaître la consigne de vitesse du moteur 1 Debug.Print("Speed1=" + MD25.Speed1.ToString()); // Pour fixer la consigne de vitesse du moteur 1 (mode 0) MD25.Speed1 = 140; |
|
|
Speed2Turn |
Fixe (à venir) ou retourne la consigne de vitesse du moteur 2 (mode 0, 1) ou la consigne de direction du système déplacé
par les deux moteurs (mode 2,3 : Turn).
Type : byte Note sur le mode Turn Selon la valeur du registre de vitesse (Speed1), le logiciel de la carte MD25 détermine si la direction est directe ou inverse.
// Pour connaître la consigne de vitesse du moteur 2 Debug.Print("Speed2=" + MD25.Speed2Turn.ToString()); // Pour fixer la consigne de direction A venir |
|
|
Encoder1 | Retourne la valeur de l'encodeur 1 (calculée à partir des registres Enc1a,b,c et d).
Type : Int32 Exemple Debug.Print("Codeur 1=" + MD25.Encoder1.ToString()); |
|
|
Encoder2 | Retourne la valeur de l'encodeur 2 (calculée à partir des registres Enc2a,b,c et d).
Type : Int32 Exemple Debug.Print("Codeur 2=" + MD25.Encoder2.ToString()); |
|
|
Battery | Retourne la tension d'alimentation (x10) de la carte en (V).
Type : byte Exemple Debug.Print("Tension=" + ((Single)MD25.Battery / 10).ToString("F1") + "V"); |
|
|
Current1 | Retourne l'intensité du moteur 1 (x10) en (A).
Type : byte Exemple Debug.Print("I_moteur 1=" + ((Single)MD25.Current1 / 10).ToString("F1") + "A"); |
|
|
Current2 | Retourne l'intensité du moteur 2 (x10) en (A).
Type : byte Exemple Debug.Print("I_moteur 2=" + ((Single)MD25.Current2 / 10).ToString("F1") + "A"); |
|
|
SoftRev | Retourne le numéro de version du logiciel de la carte MD25.
Type : byte Exemple Debug.Print("Vers.=" + MD25.SoftRev.ToString()); |
|
|
AccelerationRate | En cours de rédaction
Fixe ou retourne l'accélération programmée lors d'un changement de vitesse. Type : byte Exemples // Pour connaître la valeur de l'accélération Debug.Print("Acceleration=" + MD25.AccelerationRate.ToString()); // Pour fixer la valeur de l'accélération MD25.AccAccelerationRate = 1; |
|
|
Mode | Fixe (à venir) ou retourne le mode de fonctionnement de la carte 0, 1, 2 ou 3.
Type : byte Exemples // Pour connaitre le mode de fonctionnement de la carte Debug.Print(Mode=" + MD25.Mode.ToString()); // Pour fixer le mode de fonctionnement de la carte MD25.Mode = 2; |
|
|
Command | En cours de rédaction
Fixe ou retourne le contenu du registre de commande. Type : byte Exemple Debug.Print("" + ); |
|
|
TransactionTimeOut | Fixe ou retourne le temps (en ms) accordé à la transaction avant la génération d'une exception System.IO.Exception.
1000ms par défaut.
Type : ushort Exemples // Pour régler la durée maximum d'une transaction à 200ms. MD25.TransactionTimeOut = 200; // Pour connaître la durée maximum accordée à une transaction ushort time = MD25.TransactionTimeOut; |
Méthodes publiques
| Syntaxe | Description | |
|
|
void GetAllRegister() | Lecture des 16 registres de la carte MD25. |
|
|
void RazEncoders() | Remise à zéro des deux encodeurs. |
|
|
void SetMode( ModeRegister valmode) | Définit le mode de fonctionnnement de la carte valmode=0, 1,2 ou 3. |
|
|
void SetSpeedTurn( byte ValSpeed1, byte ValSpeed2Turn) | Règle la vitesse des moteurs. |
|
|
void StopMotor() | Arrêt des deux moteurs. |